

 (recent CV;
e.g., member DATA SCIENCE
)
(recent CV;
e.g., member DATA SCIENCE
)
Tel: (519) 888-4567 ext. 45589;
FAX: (519) 725-5441; Office MC6312;
URL:
www.math.uwaterloo.ca/~hwolkowi/,
(last edited )
 ,
for bad links etc...
,
for bad links etc...
Research/Publications/Software/Talks/etc... |
e.g. Publications&Codes&Abstr. || googlescholar-citations || MathSciNet Search Publ. || Talks/confs/ || directory of reports || pdf list Publ. || colleagues || geneology || my publs. bib file || tarfile with all bib files |
Teaching |
e.g. Graduate Studies Academic Calendar || Grad. Studies C&O|| Computat. Sc. ) || CO 372, Portfolio Optimization Models (W24); || CO 367, Continuous Optimization (F24); || etc ... |
Interesting (math related) Sites |
e.g. Conferences || Comput. Sc. || Eigenvalues || Global Opt. || ILAS (lin alg) || Math. General || Numerical Analysis, || ... |
Personal |
e.g. old/new/morephotos|| MY-BOOK-Reading-page|| email squirrel || Handbook of SDP || citeseer || Math. Progr. Glossary || WOTD || weather cond. || tools || reference.com || CCDemocracy || HonestReporting || campus watch || OHS64 || Mprime || Address || ... |
{kind=link}
{kind=link}
- Special Issue on Recent Trends in Optimization Methods and Their Applications Dedicated to Henry Wolkowicz on the Occasion of His 75th Birthday, Applied Set-Valued Analysis and Optimization, Vol 5, Issue 2.
- Workshop on Recent Advances in Optimization, October 11 - 12, 2023, The Fields Institute
- Fields Focus Program on Geometric Constraint Systems July 1 - August 31, 2023
- Nov. 8-9, 2024; 26th Midwest Optimization Meeting & Workshop on Large Scale Optimization and Applications; Hosted by the University of Waterloo
- October 28-29, 2022; 24th Midwest Optimization Meeting & Workshop on Large Scale Optimization and Applications; Hosted by the University of Waterloo
- Comb. Opt. Tutte seminars/on youtube
- always a 'nice' surprise website
- SOME FUNDAMENTAL THEOREMS IN MATHEMATICS, OLIVER KNILL
- Henry Wolkowicz selected SIAM Fellow, Tuesday, March 31, 2015
- Henry Wolkowicz #29 in Canada, 2022 Edition
- ILAS Interview: TWO research communities
- Facial Reduction in Cone Optimization with Applications to Matrix Completions tutorial 2016
- The Many Faces of Deneracy in Conic Optimization, monograph Dec/17
- Parametric convex quadratic relaxation of the quadratic knapsack problem, EJOR Editors' Choice Articles, January 2020
- Outstanding performance in scholarship, teaching and service award, in 2019.
- Gail Wolkowicz Receives 2014 CMS Krieger-Nelson Prize
- World Math Seminars
- Mathematical Programming Glossary ⓒ
- "Mathematical model of anaerobic digestion in a chemostat: effects of syntrophy and inhibition", by Marion Weedermann, Gunog Seo & Gail Wolkowicz; winners of Lord Robert May Best Paper Prize, 2013, Journal of Biological Dynamics.
- official announcement: Miguel Anjos elected as Fellow of the Canadian Academy of Engineering! (and local announcement details)
- Edward R. Vrscay, home page, appl. math. UofW
- SIAM Journal on Optimization, SIOPT
- Mathematics of Operations Research, MOR
- Computational Optimization and Applications, COAP
- OPEN ACCESS OPTE Mar./14 issue
- Journal of Global Optimization, JOGO
- Applied Set-Valued Analysis and Optimization
- SN Operations Research Forum (Springer)
- Frontiers in Applied Mathematics and Statistics
- Opt. Editorial Board; Frontiers in Appl Math. Stats
-

- Computational and Analytical Mathematics, Springer Vol. 50, 2013
- SIAM Web Page
- SIAG/Optimization
-

- Why Do Math
- world class software/AldenMath
News and Noteworthy
As of November 21, 2021. ( OLD entries)-
Canoeing pics with visiting Aragon family and Optimization group, Sat
July23, 2023.
-
At the head of the river/at START
-
adventurers are:
- Mengmeng Song, visiting PhD from Beihang University, China.
- Leo Woosuk Jung, PhD C&O, UofW
- David Torregrosa-Belen, visiting PhD from University of Alicante, Spain.
- Kay Barshad, PostDoc., C&O, UofW.
- Visiting family: Vera with Francisco J. Aragon Artacho visiting Prof. University of Alicante, and then Nuria, Sophia
- Henry Wolkowicz, Prof. C&O, Univ. of Waterloo.
- Gail Wolkowicz, Prof. Math., McMaster Univ.
- Tyler Weames, Masters C&O, UofW, and Victoria.
- Bethany Caldwell, visiting PhD, University of South Australia.
- Matt Hough, Masters, Univ. of Waterloo.
- The blue heron standing and flying.
- some pairs of paddlers:
-
At the head of the river/at START
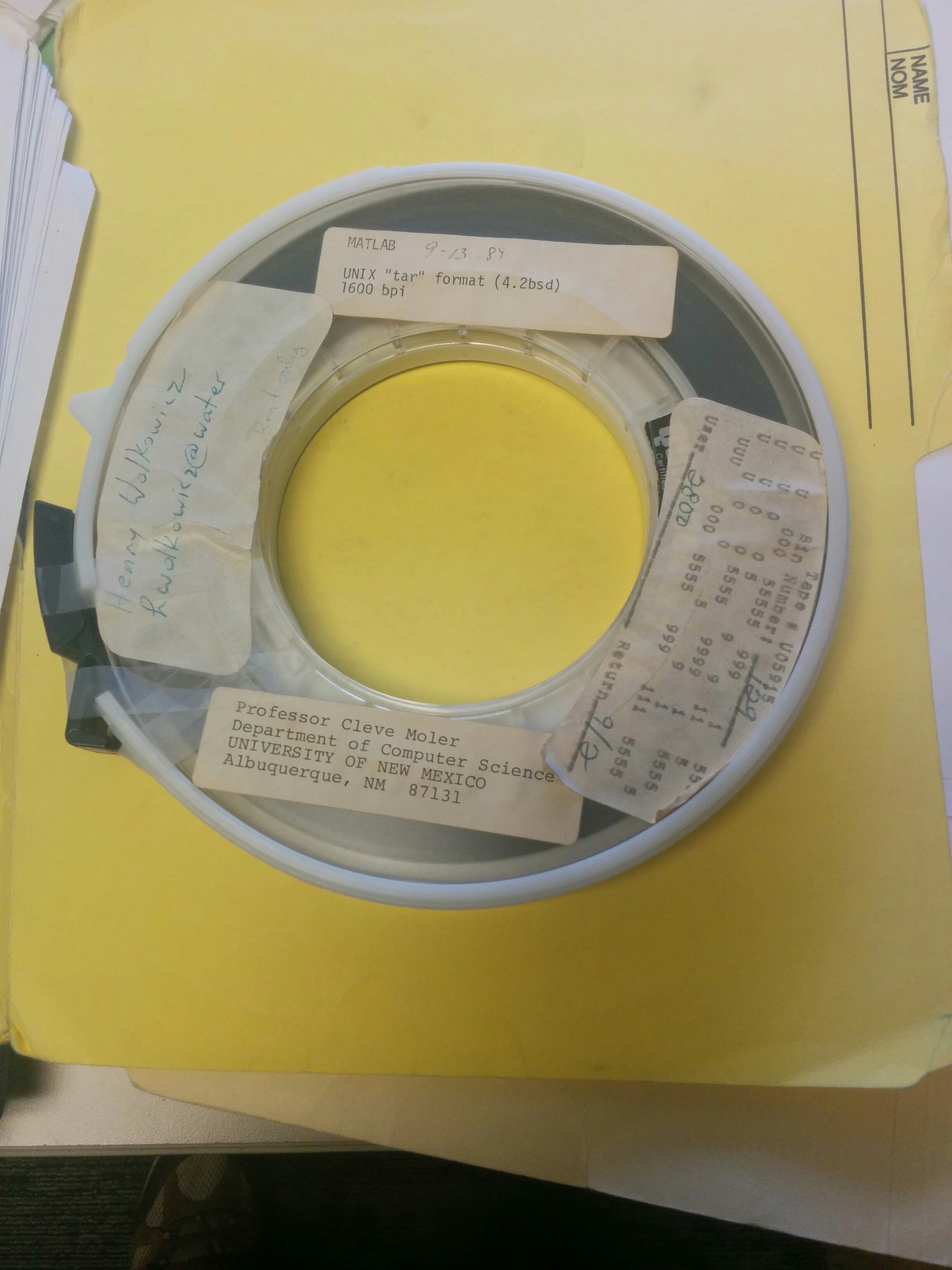
- Photo of original MATLAB computer tape from 1984; BUT, beware of one bug - here is the fix
- One World Optimization Seminar
- Fields Workshop: Recent Advances in Optimization, Dec 6-7, 2022 with Fields Workshop pictures
- E-NLA, World: Num. Lin. Alg. Seminars
- Seven Sins of Numerical Linear Algebra at Nick Higham's BLOG.
- Mathematics in Movies
- So You Want to Study Mathematics !!!!…
- An Introduction to Lagrange Multipliers, by Steuard Jensen
- In Our Time: S18/30 Euclid's Elements IN OUR TIME!!!
- A Layman’s Guide to Recreational Mathematics Videos
-
the anthology Before All Memory is Lost, has
received the 2017 Canadian Jewish Literary Award in the category of Holocaust
Literature.
No doubt, the stories of these courageous woman will enrich the knowledge of
future generations about the power of the human spirit and enable readers to
grasp a deeper understanding of the Holocaust - one story at a time.
Holocaust Literature: Before All Memory Is Lost: Women's Voices from the Holocaust (Azrieli Foundation), edited by Myrna Goldenberg, is the first anthology ever published by the Azrieli Foundation. Twenty-five women (including one chapter from Chana Mindla Wolkowicz) reflect on their experiences of survival. Each account is woven together by a common thread: women resisted and, ultimately, triumphed against the brutality they faced during the Holocaust. The book features a wide variety of narrative styles, including prose, poetry and diary excerpts.
- Article about Henry at Woodstock in Mathnews at UofW (see page 2)
- To Power The World article by Daniel H Wolkowicz
- RADIOOOO, international/all years.
- MATLAB code for solving ADMM for the SDP relaxation of the QAP, GitHub project.
- MATLAB code for solving the Euclidean Distance Matrix completion problem, GitHub project.
- Explore Woodstock 1969 e.g., 1: Richie Havens, Arlo Guthrie, Joan Baez; 2: Santana, ***Canned Heat, Creedence Clearwater Revival*** 3: **Jefferson Airplane**, Joe Cocker, Country Joe and the Fish, Janis Joplin, **Crosby, Stills, Nash & Young, Paul Butterfield Blues Band, Jimi Hendrix**
- UofW Comp. Math Student Reports
- The Physics of Climate Variability and Climate Change, by Michael Ghil, Valerio Lucarini arxiv.org.
- Pino Tenti Memorial Scholarship
- Miroslav Fiedler Memorial Page, 1926-Nov-20-15
- Leiba Rodman Memorial Page, Mar-2-15
- Hans Schneided Memorial Page, Oct-28-14
- 4D Toys, video
- Fundamentals of Lin. Alg. and Opt., ebook Dec/17.
- Woodstock 'unseen/new' photos
- HowKold youtube channel (politics/misc)
- The centrality of mathematics in the history of western thought, by Judith V. Grabiner, Mathematics Magazine, vol 61, Oct. 1988.
- Photo of original MATLAB computer tape from 1984
- The University of Waterloo ranks 10th on the Parchment Student Choice College Rankings of 2016, among other top schools such as Stanford and MIT.
- Henry Wolkowicz selected SIAM Fellow, Tuesday, March 31, 2015 ( and local dept announcement and local copy)
- Gail Wolkowicz Receives 2014 CMS Krieger-Nelson Prize
- Miguel Anjos elected as Fellow of the Canadian Academy of Engineering! June 2015
- A Liberal Decalogue: Bertrand Russell's 10 Commandments of Teaching; "Do not fear to be eccentric in opinion, for every opinion now accepted was once eccentric." and Einstein for Everyone
- Reference Tagger, arbitrary unstructured academic citation changed to BibTeX record.
- "Throughout history, poverty is the normal condition of man. Advances which permit this norm to be exceeded - here and there, now and then - are the work of an extremely small minority, frequently despised, often condemned, and almost always opposed by all right-thinking people. Whenever this tiny minority is kept from creating, or (as sometimes happens) is driven out of a society, the people then slip back into abject poverty. ... This is known as "bad luck" " Robert Heinlein
- Penrose: from mathematical notation to beautiful diagrams, software!!
- Library of Economics and Liberty, articles, econlog, econtalk, videos.
- Photos from the Midwest Optimization Meeting at UWO, Oct. 2013; e.g. Gabor, Dima, Vris.
- Volume 1, Issue 1 of new: Journal of Operations Research of China
- Diamond Jubilee Medals awarded Nov. 30, 2012; 21 Mitacs associates recognized for contributions to Canada (including Miguel Anjos)
- that one unix command you wish you knew years ago.
- SPROS: An SDP-Based Protein Structure Determination from NMR Data
- C&O Reading Group
- doug's matlab videos
- COPS, Computational OPTimization Solutions cluster. (linopt.math.uwaterloo.ca)
- What Every Computer Scientist Should Know About Floating-Point Arithmetic from SUN.
- EDMs, Euclidean Distance Matrices (wikimization entry)
-
SIAM: LOCUS, Online Journals;
Annual Meeting/10 -
presentations online; and
 ,
Activity Group on Optimization.
,
Activity Group on Optimization.
- The Matrix Reference Manual
- COAP Best Paper Awards
- Handbook of Linear Algebra, recognized as an OUTSTANDING ACADEMIC TITLE by Choice magazine, 2008.
- MSRI, Math. Sci. Res. Instit.; and a Workshop given by H.W. (with Nathan Krislock), and the main workshop webpage and a ABC Interview (with video) at MSRI. ( pictures Stanford visit Nov/09)
- George Dantzig Memorial Site
- an annotated bibliography of SDP.
- ISI Web of Knowledge
- ANNOUNCING: HANDBOOK OF SEMIDEFINITE PROGRAMMING, (Please send me any typos/errors you find or new bibliography entries - see current list of typos and current bibliography.)
- Mathworld, Eric Weisstein's World of Mathematics; And PLUS, internet magazine about mathematics.
- Famous Problems in the History of Mathematics, ( a Math Forum Project), and famous paradoxes.
- Mathematics Genealogy Project..... and Personally:...
- Interactive Mathematics Miscellany and Puzzles, Alexander Bogolmony's spectacular web-site. ( Some interesting quotes)
- NEOS Server: library, technology, guide; solves LP, NLP, SDP, ... ;
- The Matrix Cookbook, a free math desktop reference for matrices. (and local dec/13 copy)
- Mathematical Programming Glossary, by Harvey J. Greenberg and now run by INFORMS Computing Society
- SIAM certificate for significant refereeing, Oct/09
- I have collected many interesting sites and FAQs for kids.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Software and Theory
Go to the Software and Theory section for detailed descriptions of my research as well as links, preprints, etc...A sample of the software:
- A Projection Technique for Graph Bisection, contains fortran programs for graph bisection.
- Linear Programming, contains matlab programs for linear programming, including a simplex method routine.
- Semidefinite Programming, contains matlab programs for semidefinite programming, i.e. linear programs where the nonnegativity constraint is replaced by a positive semidefinite constraint on matrix variables. Also available: an annotated bibliography of SDP.
- matrix completion problems with both the semidefinite and the Euclidean matrix completion problem.
- Trust Region Subproblems consist in minimizing a quadratic function subject to a quadratic constraint.
Personal
Work AddressI was born February 25, 1948 in Lodz, Poland. I was married (in Montreal) to Gail Susan ( windsurf/08; Finland photo, the other ( video) Doctor Wolkowicz who is interested in Research on Mathematical Biology, Ecology, Modelling, Bifurcation Theory, and Differential Equations; though the masters thesis at McGill is titled: Some aspects of stability in nonlinear programming) and we have a son ( Daniel Howard :) )
{kind=link}
{kind=link}
misc. personal information, and for Nathan, etc...

Start of
 's
Home Page
(more
ambigrams)
's
Home Page
(more
ambigrams)

Users' Home Pages on
math,
(C) Copyright Henry Wolkowicz, 1991.
, by Henry Wolkowicz